本ソフトのバージョンアップ時期は未定です。
モーション作成支援ソフト「意信電信」は、 現在のところLittle Burning Core(©宮田耕自氏)をターゲットに想定し開発を進めています。 通信データの仕様は、通信データ仕様をご覧ください (本バージョンでは、チェックサムは送信していません)。
本ソフトの著作権はdenno_onoに帰属します。 利用においては全て個人の責任で行ってください。 あらゆる被害に著作権者は一切の責任を負いません。
本ソフトは、株式会社 夢現工房様のご依頼により 作成したものです。 夢現工房様のご好意により、フリーソフトとして公開することになりました。 なお、夢現工房様をのぞき営利目的などの無断利用は一切禁止します。
本ソフト開発の時間および若干の予算を確保するために、 ご利用いただいている方は掲示板もしくは下記のアドレスまで ご報告いただけると幸いです。
企業様でご依頼などがありましたら、掲示板もしくは 下記のアドレスまでお願いいたします。
y_ono1[at]mail.goo.ne.jp ([at]は@に変更して送って下さい)。
本ソフトは、以下のアイコンをダブルクリックすることによって実行できます。 必要なファイルやフォルダを生成しますので、 あらかじめフォルダを作り、実行ファイルを入れておくことをお勧めします。
以下がメイン画面です。 初めて起動したときには、カテゴリ「歩行ロボット」、モーション「通常歩行」、ポーズデータ「ホームポジション」が作られ 表示されるようになっています。
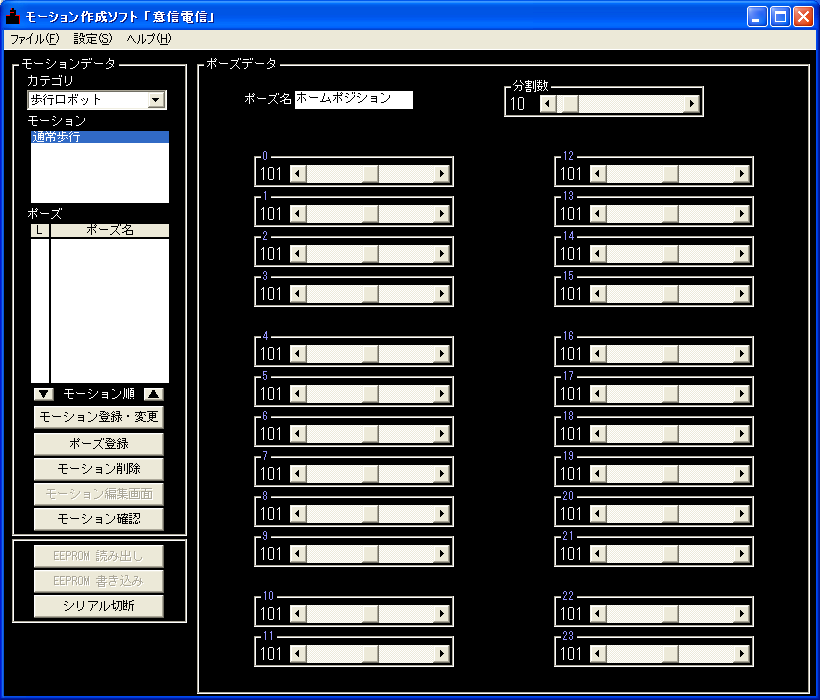
「ポーズ」はロボットの姿勢を意味します。 「モーションデータ」の「ポーズ」を選択すると、 そのデータ内容が「ポーズデータ」に表示されます。 「ポーズデータ」はスライダを動かすことで変更できます。 スライダを動かすと変更されたデータが送信されます。 変更した「ポーズ」は「ポーズ登録・変更」ボタンで変更されるまで保存データに反映されません。 「分割数」は前の「ポーズ」からの移行時間を表しています。 単位は、約20msになります。
「ポーズ」をいくつか連続してつないだものが、 「モーション」になります。 「カテゴリ」は「モーション」の集まりで、 同種の「モーション」を分類するために使います。
一つの「モーション」に登録できる「ポーズ」の数は、 最大で12に制限しています。 「カテゴリ」や「モーション」の数に制限はありません。
「モーション」の確認は、「モーション確認」ボタンでおこないます。
現時点では、「モーション編集画面」「EEPROM 読出し」「EEPROM 書き込み」の各機能は利用できません。
ボタンの機能は、「カテゴリ」「モーション」「ポーズ」のどこを選択しているかによって変わってきます。
 |
 |
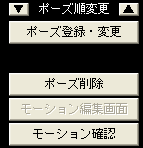 |
| 「カテゴリ」選択状態 | 「モーション」選択状態 | 「ポーズ」選択状態 |
「ポーズ名」は、同一「モーション」内でも同名のものを複数使うことができます。 ただし、同じデータを利用しますので、 ひとつのデータを変更した場合には、同名の全ての「ポーズ」データが変更されることになります。 なお、異なる「モーション」内の同名の「ポーズ」は影響を受けません。
各モーション内では、ひとつだけループを設定することができます。 「ポーズ」の「L」リストボックスで、複数のセルを選択すると、 ループ設定ダイアログが出てきます。 セルの選択は、ドラッグで選択しても良いし、SHIFTやCtrlを使っても結構です (Shift+下向き矢印などを使った場合には、2個のセルが選択された時点で ループ数の要求が出ます)。 ループ数は、半角で入力してください。
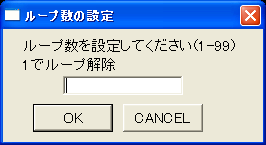
ループ数を入力すると、ループの最初に対応する項目にループ数が、ループの最後には「E」のマークが出ます。
お勧めはしませんが、スライダの最大値最小値は「minmax.ini」に、 レイアウトは「layout.ini」に保存されています。 値を変更することによって、スライダの最大最小値やレイアウトを変更することもできます。 データ送信時などの最大値最小値のチェックはおこなっていません。 デフォルトの値に戻したい場合には、削除してください。 次回プログラム終了時にデフォルト値で作成されます。 なお、「homepos.ini」はホームポジションの値ですが、 「設定」メニューの「ホームポジションに設定」を使って設定することをお勧めします。
| SEO | [PR] 爆速!無料ブログ 無料ホームページ開設 無料ライブ放送 | ||
