| 前へ | 目次 | 次へ |
| JW_CAD for Windowsで図面を描く |
|
では、サーボブラケットの設計図を描いてみましょう。 そのためには、どのようなロボットにするか考える必要があります。 今回は、12個のFutaba S3003を用いて、 4足歩行ロボットを作ることを考えてみます。 |
| モータの配置を考える |
|
4足歩行ロボットの場合には、 1脚3個のモータを使い、4脚で12個という構成が多いようです。 1脚分3個のモータの配置は、 以下の写真のような「哺乳類型」(もしくは「犬型」)(とdenno_onoは勝手に名づけています)が多いような気がします。 |
 |
|
ここでは、denno_onoの勝手な趣味から、 以下のような、「爬虫類型」(と勝手に呼んでいます)の構成で考えることにします。 |
 |
| 図面を手書きする |
|
とりあえず、大体の寸法を図面にしてみました。 手書きの上に、あれこれ書き足していますので、 あまり当てになりません。 通常の穴あけになっているところも、 じつはねじ穴だったりします(@@)/ また、ブラケットごとにどこに穴をあけるか違っていますが、 ここでは全部描いておきました。 「サーボ側ブラケット」もサイドの部分は作りません。 |
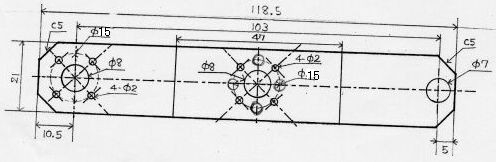 |
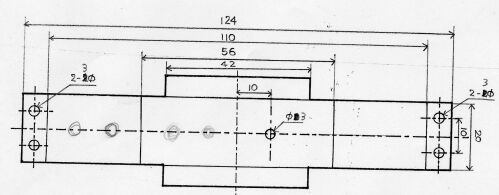 |
| JW_CAD for Windowsをダウンロードし、使い方を学習する |
|
JW_CAD for Windowsは窓の杜や Vectorなどから ダウンロードできます。 denno_onoはJwCad_Winお助け君の 練習問題を拾い読みして使っています。 後はバリバリ描くだけです。 |
 |
|
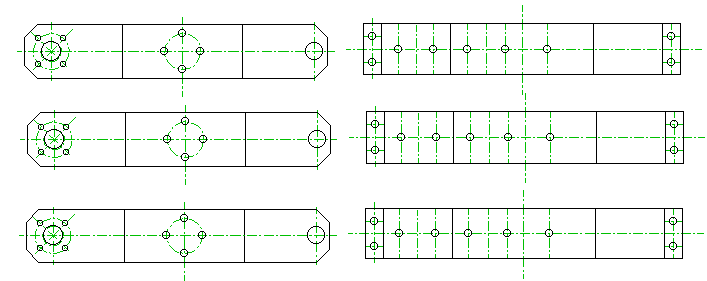
(料理番組風に)あらかじめこちらにご用意しておきましたので、 この図面で作っていくことにいたしましょう。 |
 |
| 2003/05/10(Sat) |
| 簡易サーボブラケットを作るのトップページへ |
| トップページへ |
