| 目次 | 目次 | 次へ |
| PIC16F84を動かすための最小の回路を考える | ||||||||||||||||||||||||
|
難しいことは分からないので、とにかく歩行ロボットを作ってみることにします。 マイコンもいろいろあって迷ってしまうのですが、最初から機能が豊富なものを使うと、 何がなにやら分からなくなる可能性があるので、できるだけ簡単なものを使ってどこまでできるかやってみます。 必要になったら、さらに高機能なマイコンを使うということで・・・ ここでは、PIC16F84A-20/Pを利用します。 理由は・・・「扱いやすいから」です。 PICの特徴など詳しいことは他に譲ることにします。 (参考文献をご覧ください。) やっていけばある程度は分かるだろうと期待して・・・ では、早速始めましょう。 まずは、PIC16F84を動かすための回路を作らなくてはなりません。 何の機能もつけずに、最小限の回路を考えてみます。 (「電子工作のためのPIC活用ガイドブック」等参照) 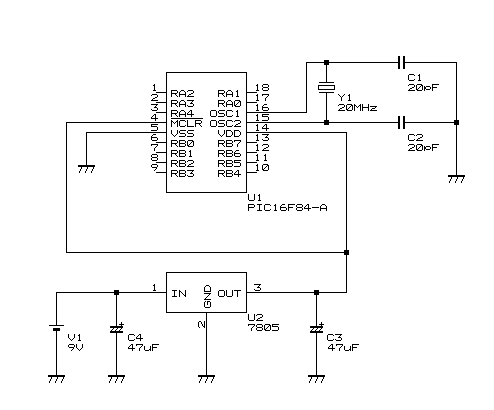 この回路は、「電源回路」と「発振回路」からなっています。 では、回路の意味と実際の部品を見てみましょう。 | ||||||||||||||||||||||||
| 電源回路 | ||||||||||||||||||||||||
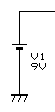
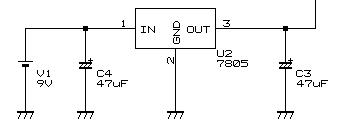 上に抜き出した部分が電源の回路です。 PICの動作電圧には多少幅があるようですが、 通常は5Vの電圧をかけるようです。 電源としては、9Vの電池を使うことにします。
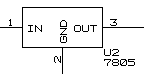
006P型9Vの電池で、コンビニなどでも売っています。 denno_onoは「ダイソー」で2個100円のものを買ってきました。 試作段階ではこれで十分かと思いまして・・・ 口が太いほうがマイナスで、細いほうがプラスです。 この電池をつなぐために、電池スナップを使います。 赤いコードがプラスで、黒いコードがマイナスです。 逆にさすことはできませんから、安心です。  秋月電子通商で1個10円です。 (東急ハンズで購入したこともあります。30円だったと思います) ここでは9Vの電池を利用して5Vを作り出すために、3端子レギュレータというものを使います。 回路図では中央の3本線が出た長方形がそれにあたります。
3端子レギュレータには、出力電圧(および電流)によっていくつか種類があり、 型番を見れば分かるようになっています。 出力電流が1mAのものを見てみましょう。 出力電圧が正ならば「78」で始まり、出力電圧に相当する2桁の数字が続きます。 つまり、出力電流が1mAのとき、
となります。三本の足は、向かって左から、入力(今の場合9Vの電池のプラスにつなぎます)、 グランド(電池のマイナスにつなぎます)、出力(5Vが出力されます)となっています。 秋月電子通商で5個セットで250円です。 denno_onoは1mAのものしかなかったのでこれを使いましたが、 なんかちょっとでかいです。 通常は最大出力電流が100mAの物を使うようです。  これらの型番は78の後にLが入って、
となります。 出力と入力の端子も逆になるので気をつけてください。 三本の足は、向かって左から、出力(5Vが出力されます)、 グランド(電池のマイナスにつなぎます)、入力(今の場合9Vの電池のプラスにつなぎます)となっています。 こちらは100円ぐらいのようです。
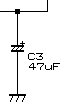
電解コンデンサです。 電解コンデンサには極性があり、2本のリード線のうち、長いほうをプラス側に、短いほうをマイナス側につなぎます。 ここでのように、電源とグランドを結ぶために用いるコンデンサを 「バイパスコンデンサ」(略して「パスコン」)というようです。 ノイズ対策に使われているようですが、 ”「なくても良いかもしれないが、万一に備えてあったほうがよいだろう」 という感じの部品”(「抵抗、コンデンサの使い方」蒲生良治他、CQ出版、1980、P122)のようです。 ”したがってこの種の技術には一定の評価方法がなく、またデータなども満足なものがありません。 しかし、今までの経験において、「こうすれば良くなった」とか「こうすればよいだろう」という点もいくつかあります” (同上)。だそうです。 denno_onoが調べた限りでは、高周波(小さく周期の早い)揺らぎには容量の小さなものを、 低周波(大きく周期の遅い)揺らぎには容量の大きなものを使うようです。 容量自体は、電源の大きさにもよっているようでした。 この辺は奥が深そうなので、これ以上深入りせず、 とりあえずは「電子工作のためのPIC活用ガイドブック」等で 用いているものを使うことにしました。 数十円で買えるようです。 | ||||||||||||||||||||||||
| 発振回路 | ||||||||||||||||||||||||
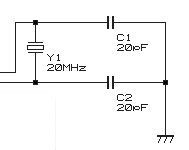
発振回路は発振子とセラミックコンデンサからなり、 PICの内部クロックを作り出すもとになっているそうです。 ここではは20MHzのPICを用いてますので、20MHzの発振子を使いました。 20MHzのPICに遅い発振子を使った場合には、その発振子のクロック数がもとになるようです。 今回は、安価なので、セラミック発振子(セラロック)を利用してみました。 負荷コンデンサを内蔵しているので(ただし、コンデンサの容量が分かりませんでした)、 外部にコンデンサをつける必要が無く、非常に便利です。 3本足の真中をグランドに接続し、両端をPICの所定のピンにつなぎます。 セラロックは水晶発振子に比べると精度が良くないようですが、 とりあえずRCサーボモータを動かすのには、問題ないようです。 秋月電子通商で1個40円です。
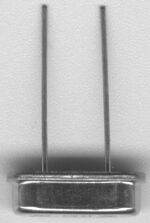
参考のために、20MHzの水晶発振子と20pFのコンデンサを載せておきます。 水晶発振子が200円程度、コンデンサは数十円程度のようです。 | ||||||||||||||||||||||||
| PIC | ||||||||||||||||||||||||
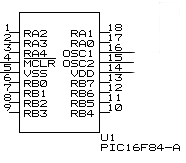
PICの本体です。 ここではPIC16F84A-20/Pというのを利用しました。 ちょっと分かりにくいかもしれませんが、 画像で上部のところに、へこみがあります。 こちら側が1番ピンがあるほうです。 この回路はPICを動かすための回路ですが、 動かすためにはプログラムを書き込むという作業をしないといけません。 そのための回路は別に作る必要があります。 PICをじかにはんだ付けしてしまうと、書き込みができないので、 PICを差し込むためのソケットを使います。  このソケットにもへこみがあるので、1番ピンがそちらに来るように配線します。 | ||||||||||||||||||||||||
| このページで紹介した品物の費用 | ||||||||||||||||||||||||
| ||||||||||||||||||||||||
| 2002/06/19(Wed),07/22(Mon),07/24(Wed) | ||||||||||||||||||||||||
| PICのトップページへ | ||||||||||||||||||||||||
| トップページへ |