<<前の日記を見る
次の日記を見る>>
04月10日(月)
04月11日(火)
04月13日(木)
04月14日(金)
04月16日(日)
04月16日(日)
04月17日(月)
04月18日(火)
<<前の日記を見る
次の日記を見る>>
屈伸を考える
計算したものの、結果があっているのかはなはだ不安です。
そこで特殊な場合を考えて確認してみます。
屈伸が簡単そうですね・・・
「やすたけ」の場合、L1=L2ですので
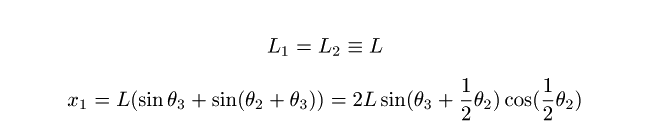
x1=0とおくと
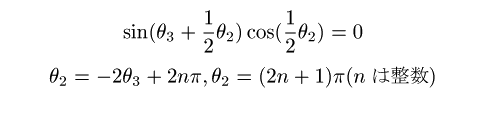
つまり、一番下のモータの2倍の角度だけ真ん中のモータを(逆方向に)動かせばよいことになります。
このとき上体が地面に対して垂直になるためには、θ1=θ3であればよいわけです。
もうひとつの解は、ひざを180度折りたためばよいということを意味しています。
このときひざ以外の二つのモータは重なることになります(現実的な解とはいえません)。
ひざをまっすぐ伸ばした状態では、θ3=0でないといけません。
これは一つ目の解に相当しています。
常識的な結果が出て一安心です(笑)
一つ目の解の場合のy1の値を求めてみましょう。
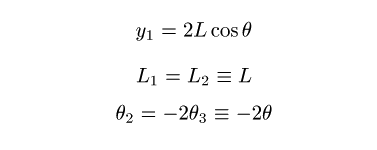
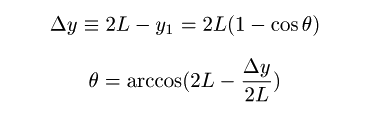
y軸マイナス方向への移動量⊿yとθの関係は以下のようになります。
参考文献の式と対比ができるようにしてみました(^^)/
参考文献
屈伸を行うときに注意すべきことは、脚を曲げる際には上体は重力の方向に動いてますが、
伸ばす際には重力に逆らっているということです。
重力に逆らって動かす場合には指示位置まで行かなかったり、時間的に遅れが出たりします。
これが全てのモータに同じように影響が出ればさほど問題は大きくないのでしょうが、
「やすたけ」のようにひざのモータを他の二つのモータより2倍の角度だけ動かさないといけないような場合には、
スピードをあげるとこのモータの遅れが顕著になります。
この場合上体は後ろに傾いてしまうわけです。
この影響を少なくするためには、
という対処が考えられます。
「ゆっくり」というのはなかなか難しいところで、実際にどのくらいなら大丈夫かやってみないといけなそうです・・・
<<前の日記を見る
次の日記を見る>>
<<前の日記を見る
次の日記を見る>>
脚関節位置の計算
少し汎用性を持たせようとしたせいで、わけが分からなくなり始めています(笑)。
それでも強引に計算を続けます・・・
まずは接地している脚を考え、一番上の(股関節の)モータ位置(x1,y1)を計算してみます。
原点は一番下のモータの軸位置としています。
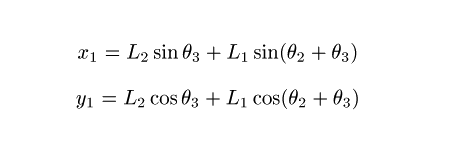
このとき、上体とy軸のなす角はθ1+θ2+θ3となります。
上体を地面に垂直にするためには、θ1=-(θ2+θ3)とすれば良いことになります。
片足で立っている状態では、x1=0となるようにすることが必要ということでしょうか・・・
(足裏の大きさがあるので多少ずれても平気でしょうが・・・)
接地していないほうの脚の、一番上のモータ位置を(x1,y1)と仮定すると、
一番下のモータの位置(x30,y30)は、
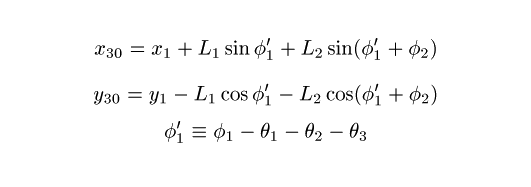
ここで各関節の角度にはΦを用いました。
足裏が地面となす角はφ1+φ2+φ3なので、
φ3=-φ1-φ2とすれば地面と足裏は平行になるはずです。
<<前の日記を見る
次の日記を見る>>
<<前の日記を見る
次の日記を見る>>
座標を考える
計算するにあたって、いきなり一般化してしまうとわけがわからなくなりそうなので、
できるだけ制限をかけた形で考えてみます。
今回は脚関節だけを考え、足を上げるための3つのモータと、重心移動のための2つのモータを別々に考えます。
まずは屈伸を考えてみます。
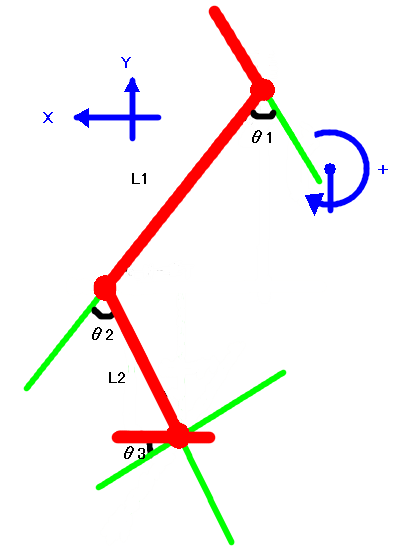
力学系を取り扱う上で重要なのは、座標系のとり方ではないかと思います。
これだけでもだいぶ面倒です。
ここでは上の図のように決めてみました。
- ロボットの前方向をX軸の正方向、上をY軸の正方向とします
- X軸からY軸への回転方向をモータの正の方向としておきます
(実際に計算するときには、モータのつけ方によって正方向を決めなおしたほうが良いかもしれません。
上図ではひざのモータの回転方向はマイナス方向になります。
「やすたけ」では、ひざモータはマイナス方向にしか動きません)
- 上の定義では、左脚と右脚で回転の正方向が違うことに注意しないといけません
(上図は左足の場合)
- 直立状態を3つの角度が0の状態とします
- どの部分が接地しているかは、あらかじめ仮定して計算します
- 接地している脚に関しては下の関節から、接地していない脚に関しては上の関節から計算することにします
(両足とも接地している場合には、それぞれ下の関節から計算することになります。
一番上の関節位置に関しては両足の間で制限がかかることになります)
- 一番下の関節は直接接地しているとは限りませんが、左右で地面から等距離にあると考えて接地している脚の一番下の関節を原点に取ります
数式を書くのにTEXがいるなぁ・・・
参考文献
<<前の日記を見る
次の日記を見る>>
<<前の日記を見る
次の日記を見る>>
「やすたけ」の測定
「やすたけ」を組み直したんですが、問題が・・・
- 右肩と右ひざのモータが動かない
- スイッチ切ってもマイコンが動いている(電源抜いても動いているのでモータの回路から電源供給されているのか?)
2番目はモータの数が少ないときには起きない問題です。
不思議だ・・・
仕方がないので、とりあえず「やすたけ」の計測を・・・
必要なのは、重心位置と足のモータの位置でしょうか・・・
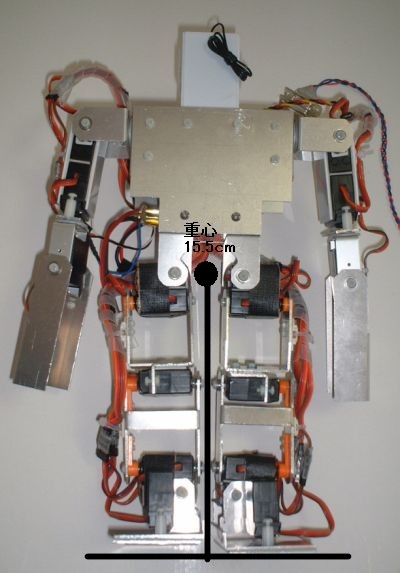
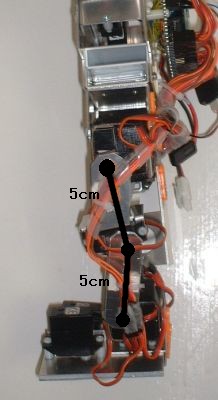
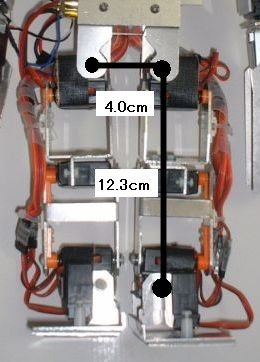
| 重心位置 | 足裏から約15.5cm |
| 屈伸用モータ間隔 | 5.0cm |
| 股関節の軸間隔 | 4.0cm |
| 重心移動用モータ間隔 | 12.3cm |
<<前の日記を見る
次の日記を見る>>
<<前の日記を見る
次の日記を見る>>
Micro 2BBMGの稼動範囲
歩行パターンを計算するにあたって、
やすたけを完成させておかないといけません。

コントロールボードは、例によって
LBC(Little Burning Core:©宮田耕自氏)を使いますが、
KONDOのBOOSTER-7を用いてリチウムポリマー電池1個でボードもモータも動かすことにしました。
ずいぶん前に、GWS Micro 2BBMGの稼動範囲を調べていたので
それをもとにホームポジションの時のパルスを決めておきます。
稼動範囲外になったかどうかの判断は、
稼動範囲外では「ジー」という音はするが動かないので、
この時点で稼動範囲外とみなしました。
パルスの周期は20mSであり、
電源はGPニッケル水素1.2V/1800mAhX4本で調べています。
| モータ | パルスON時間の幅(mS) |
|---|
| モータ1 | 0.56-2.54 |
| モータ2 | 0.54-2.46 |
| モータ3 | 0.53-2.49 |
| モータ4 | 0.52-2.45 |
この結果から、今回は
- GWS Micro 2BBMGは0.6mS-2.4mSのあたりで利用(中心が1.5mSあたり)
- 稼動範囲は235度ていどなので、0.00766mSがほぼ1度に対応
とします。
ねじロック剤などを使ってできるだけガタのないように組み直しです。
<<前の日記を見る
次の日記を見る>>
<<前の日記を見る
次の日記を見る>>
いよいよ算数というものをはじめようかと・・・
わたしは、「数学は本当に必要と思うまで使わない」という性格
(というか、単に数学ができないことの自己弁護だと思いますが・・・)なので、
ロボットのモーションも計算などする必要があるのか非常に疑問でした。
最近「歩行に関しては、数学を使うのが最も簡単」であることが理解できたような気がしてきました
(片脚の自由度が2とか3とかの場合は別でしょうが・・・)。
汎用性だとか、拡張性だとかということまで考えると、
モーションエディタのようなものでチマチマ作ることは、
はっきりと非効率です
(歩行以外の動きでは非常に有効だと思いますが・・・)。
そこで、いよいよ数学というか算数というか・・・そんなのを使って歩行パターンを作ることに挑戦してみようかと思います。
できるだけ簡単なところから・・・
とりあえずターゲットはやすたけです。
いろいろな計測からだろうなぁ・・・
<<前の日記を見る
次の日記を見る>>
