2006年05月05日(金)
OAKS-mini(UART1エコーバックプログラム)
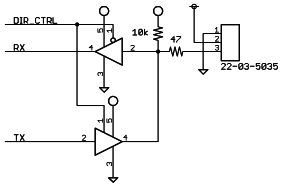
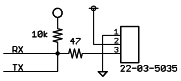
OAKS-miniの拡張ボードの回路図などを見るとUART1とパソコンをつなぐようになっているのですが、 サンプルはなぜかUART0のエコーバックだったりします。 で、ちょっと書き直して実行。
.lword dummy_int ; uart2 transmit(for user)(vector 15) .lword dummy_int ; uart2 receive(for user)(vector 16) .lword dummy_int ; uart0 transmit(for user)(vector 17) .lword dummy_int ; uart0 receive(for user)(vector 18) .lword dummy_int ; uart1 transmit(for user)(vector 19) .glb _receive ; .lword _receive ; uart1 receive(for user)(vector 20) |
/****************************************************/
/* プロジェクト名: sci01 */
/* ファイル名: sci.c */
/* 内容: UART1エコーバックプログラム */
/* 日付: 2006.05.05 */
/* コンパイラ: NC30WA (Ver.4.00) */
/* 作成者: ono */
/****************************************************/
/* 転送速度:19200pbs */
/* (20M/19200/16=65:よって設定値は65-1) */
/* データ長:8bit ストップビット:1 パリティ:なし */
/* インクルードファイル */
#include "sfr26.h" /* OAKSmini用定義ファイル */
/* プロトタイプ宣言 */
int main(void); /* メイン関数 */
void uart1ini(void);
void receive(void); /* 割込み関数 */
#pragma INTERRUPT receive
/* マクロ定義*/
#define U1_BRG 64 /* 転送速度レジスタの設定値 */
/**************************************************************************
メイン関数 : main()
**************************************************************************/
int main(void)
{
uart1ini(); /* uart1初期設定 */
_asm( "\tFSET I"); /* 割り込み許可 */
while(1);
return(0);
}
/**************************************************************************
* uart1初期設定関数 : uart1ini()
**************************************************************************/
void uart1ini(void)
{
u1mr = 0x05; /* 送受信モ−ドレジスタ 内部クロック */
/* 非同期、8ビット、パリティなし、*/
/* スリープなし */
u1c0 = 0x10; /* 送受信制御レジスタ0 クロックf1選択 */
u1brg = U1_BRG; /* 転送速度レジスタ */
s1ric = 0x06; /* 割込みレベルの設定 */
u1c1 = 0x05; /* 送受信制御レジスタ1 送受信許可 */
}
/**************************************************************************
* 受信割込み関数 : receive()
**************************************************************************/
void receive(void)
{
int rdata; /* 受信バッファ */
rdata = u1rb; /* データ受信 */
rdata &= 0x0ff; /* 受信データ送信 */
u1tb = rdata;
}
|
文字列送信関数などを作る必要があるなぁ・・・