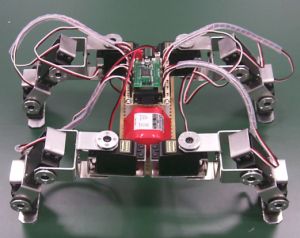
| CPUボード | AKI-3664 |
| アクチュエーター | Futaba FP-S3003(4脚X3個) |
| 大きさ | 胴体:50X150mm 脚の長さ:210mm |
| 重量 | 1.02Kg |
| 電源 | マイコン:NiMH8.4V モータ:Ni-Cd6.0V |
40000円弱。(ただし、要アルミ加工。)
ただし、モータ用Ni-Cd6.0Vを単三NiMH1.2VX5本に替え、 モータをSANWA SX-101Zに、 フランジ付きベアリングをハトメなどに変更すれば、 30000円弱でできるのではないでしょうか。
パソコンからデータを送り込んでモーションを再生。 もしくは、以下のモーションを連続再生。
| SEO | [PR] 爆速!無料ブログ 無料ホームページ開設 無料ライブ放送 | ||
