<<前へ 次へ>>
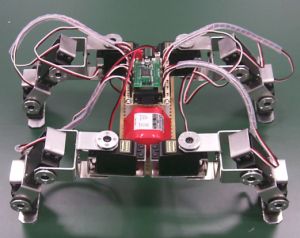
上部が前面にあたる
胴体を小さくして、トルクが小さくても歩けるように配慮。
見栄えや滑りにくいところは良かったのだが、足先の接地面積が小さく不安定。 すべりにくさも、すり足のようなことができず、 良い面ばかりとは言えず。
2003年10月06日版。
2003年11月04日版。 足裏をアルミに変更。