/*------------------------------------------------------*/
/* ファイル名: ad02.c */
/* 内容: 8ビットAD変換 */
/* 日付: 2005.07.20(Wed) */
/* 作成者: ono */
/*------------------------------------------------------*/
#include<oaks_sfr.h>
#pragma INTERRUPT adint
#pragma INTERRUPT ta0int
void adint(){
p7=~(ad4l); /* 下位8ビット */
ir_adic=0;
}
void ta0int(){
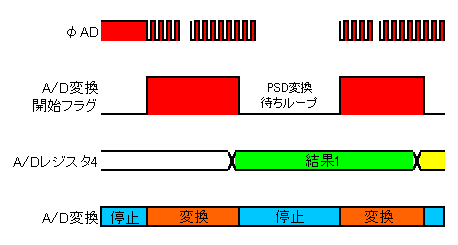
adst=1; /* A/D変換開始 */
}
int main(void)
{
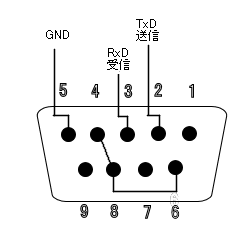
pd10=0x00; /* P10/ANを入力に設定 */
adcon0=0x84;
/* AN4,単発モード,ソフトウェアトリガ,A/D変換停止,fAD/2 */
adcon1=0x20; /* 8ビット,Vref接続,ANEX0,ANEX1は使用しない */
adcon2=0x01; /* サンプル&ホールドあり */
adic=0x06; /* 割り込みレベル設定 */
/* 以下、LED出力のための設定 */
p7=0xff;
pd7=0xff;
/* タイマA「OAKS16プログラミングテキスト」(P77)参照 */
ta0mr=0x80; /* タイマモード,パルス出力なし,ゲート機能なし,f32(2us) */
ta0=27500; /* 55ms */
ta0ic=0x05; /* 割り込みレベル設定 */
ta0s=1; /* タイマA開始 */
_asm("\tFSET I"); /* 割り込み許可 */
while(1){
;
}
return(0);
}
|